Wie unser JEO-Kombimotor die Branchenstandards neu definiert: Leichtbauweise, hohes Drehmoment und unerreichte Haltbarkeit
Wie Unser Motor Industriestandards Neudefiniert: Leichtbauweise, Hohe Drehmomentleistung und Unübertroffene Haltbarkeit
Apr 24,2025
In der Robotik, Luft- und Raumfahrt sowie bei tragbaren Geräten haben herkömmliche Motoren – einschließlich Standard-Wechselstrommotoren, einfacher Schrittmotoren und herkömmlicher Getriebemotoren – Schwierigkeiten, ein leichtes Design mit hohem Drehmoment und langfristiger Haltbarkeit zu vereinbaren. Diese Lücke ist besonders entscheidend in der Entwicklung humanoider Roboter und Motoren, wo der Kernmotor des humanoiden Roboter-Gelenks Vielseitigkeit erfordert.
Übermäßige Wirbelstromverluste führen zu einer Wärmeentwicklung, verringern die Effizienz und verkürzen die Lebensdauer der Bauteile (z. B. Motorkupplungen, Rotationsaktuatoren). Umfangreiche Strukturen begrenzen die Portabilität von Gelenkmotor-Robotern und schränken die Einsatzmöglichkeiten von bionischen Gelenkmotoren und Schultergelenkmotoren ein. Selbst fortschrittliche Typen wie einfache Servomotoren oder Standard-Bürstenlose-Gleichstrommotoren erfüllen die modernen Anforderungen nicht, was eine dringende Nachfrage nach optimiertem Gelenkmotor-Design schafft.
Als führender Hersteller von Gelenkgetrieben gehen wir diese Probleme mit Innovationen in vier Kernbereichen an:
Leicht & Tragbar: Für Kompakte Gelenke
Dank innovativer Strukturtechnik und fortschrittlicher Materialien erzielen unsere Motoren—rahmenlose Drehmomentmotoren, DC-Hohlbechermotoren, kernlose Motoren—[5]% Gewichtsreduktion gegenüber herkömmlichen Synchronmotoren oder schweren Getriebemotoren. Optimierte Magnetkreise (basierend auf der kernlosen Motorentechnologie) und leichte Verbundwerkstoffe gewährleisten Tragbarkeit ohne Leistungsverlust.Ideal für platzkritische Szenarien: Integration von Bionic-Roboter-Gelenkmotoren, Antrieb von Schultergelenkmotoren und Miniaturisierung von Roboter-Gelenkmodulmotoren—für erhöhte Beweglichkeit von Gelenkmotor-Robotern.
Hohe Drehmomentdichte & Sensibilität: Für Aufgaben mit hoher Belastung
Mit optimiertem Kupferfüllverhältnis und fortschrittlichem magnetischem Design liefern unsere Hochdrehmomentdichte-Roboter-Gelenkmotoren (Bürstenlose Gleichstrommotoren, präzise Servomotoren) branchenführende Drehmomentdichte. Dynamische Tests zeigen 20 % höheres Drehmoment im Vergleich zu Standard-Schrittmotoren/AC-Motoren und [5]% schnellere Reaktion als traditionelle, koppelte Motorantriebssysteme.Bahnbrechend für anspruchsvolle Anwendungsfälle: humanoide Robotik & motorisierte Geländenavigation, Präzision hochleistungsfähiger Roboteraktuatoren sowie der Einsatz von robusten Robotergelenkaktuatoren. Weitere Informationen finden Sie im JEO Motor Solution Hub.
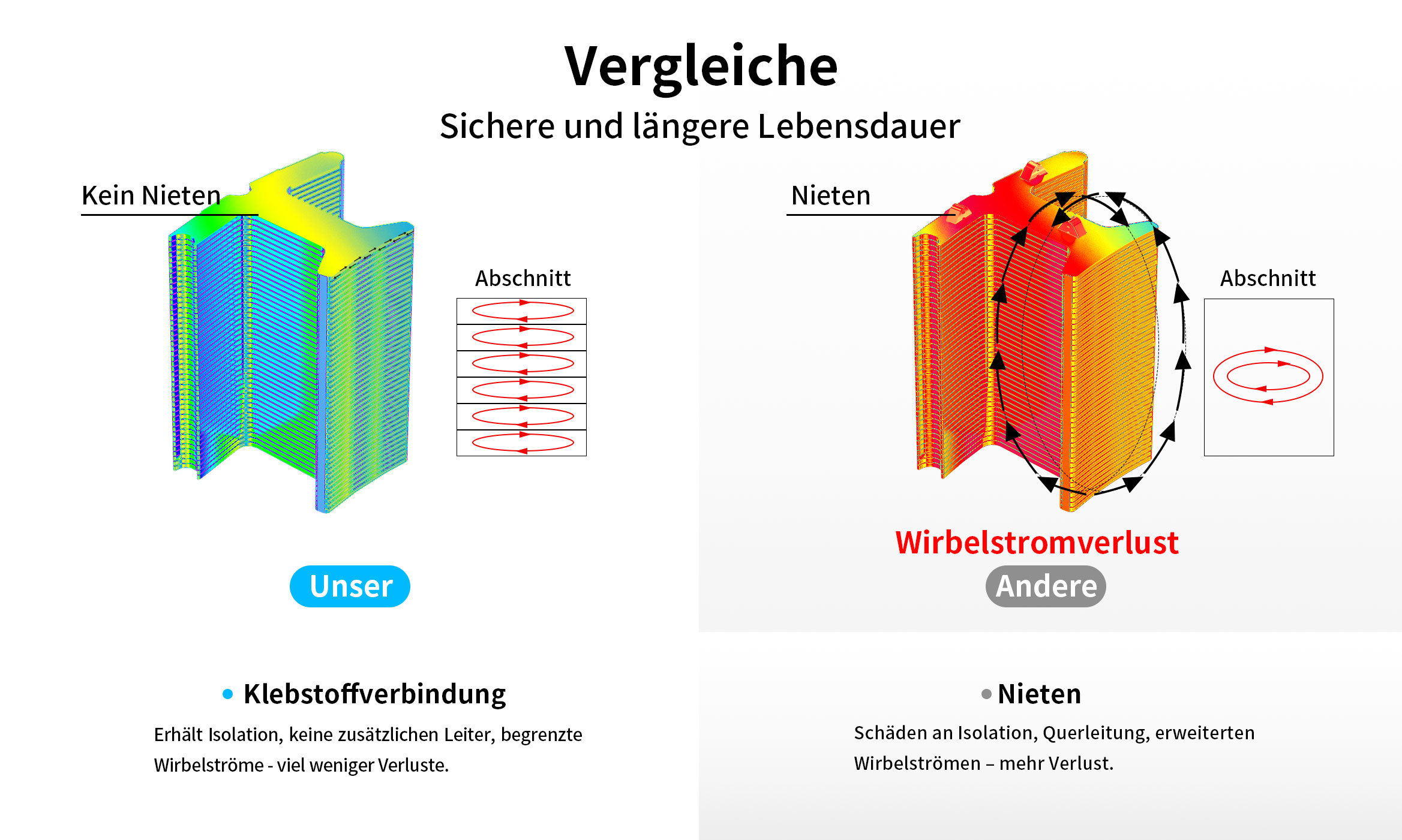
Geringe Wirbelstromverluste & schnelle Wärmeableitung: Für Stabilität
Innovative Wicklungstopologie und integriertes Wärmemanagement reduzieren Wirbelstromverluste um 5 % in unseren Direct-Drive-Linearmotoren und Rotations-/Frameless-Drehmomentmotoren im Vergleich zu traditionellen Rotationsaktuatoren/Harmonischen Roboter-Gelenkaktuatoren. Wärmeleitende Materialien und optimierte Wege steigern die Wärmeableitungseffizienz um 11 % und verhindern Überhitzung in langlebigen Smart-Motoren und Baugruppen von Rotationsaktuator-Gelenkmodulen. Erfahren Sie mehr unter JEO Motor Technical News.
Langanhaltende Haltbarkeit: Für geringere Gesamtkosten
Reduzierte thermische Belastung, minimaler Wirbelstromverlust und robustes Design verlängern die Lebensdauer unserer gesamten Produktpalette: bürstenlose Gleichstrommotoren, Robotergelenkaktuatoren, rahmenlose Drehmomente-Motoren. Feldtests bestätigen eine dreifach längere Lebensdauer für unseren humanoiden Roboter-Gelenkmotor/rahmenlose Drehmomente-Motoren im Vergleich zu herkömmlichen Modellen.Dies senkt die Wartungskosten und die Gesamtkosten für Betreiber von Gelenkmotor-Robotern. Erhalten Sie maßgeschneiderte Haltbarkeitsdaten über das JEO Motor Service Portal.
Wir haben unseren spezialisierten humanoiden Robotergelenkmotor (hybride bürstenlose Gleichstrommotoren/Harmonische Robotergelenkaktuatoren) in einen Hochleistungs-Humanoiden Roboter & Motor integriert, um kritische Lücken zu schließen.
Vor-Integrationsprobleme
Der Roboter verließ sich auf traditionelle Zahnradmotoren/Drehaktuatoren, was verursachte:
Begrenzte Laufzeit (übermäßiges Motorgewicht);
Unzureichendes Moment des Robotergelenkaktuators (fehlgeschlagene Schwerlastaufgaben auf schwierigem Gelände);
Häufiges Überhitzen des Motorkupplers (erforderliche Abschaltungen zur Kühlung).
8% höhere Nutzlast (Präzisions-Servo-Motor-Gelenke) → konnte schwerere Werkzeuge handhaben;
Keine Überhitzung (Thermomanagement gemäß den Standards für Direct-Drive-Linearmotoren und -Rotationsmotoren) → 24/7 Betrieb.
Langzeitvalidierung
Drei Monate kontinuierlicher Nutzung (Gehen, Greifen, dynamische Bewegungen) zeigten keine Ausfälle beim Roboter-Gelenkmotor, dem rotierenden Aktuatormodul oder benachbarten Systemen – was die jährlichen Wartungskosten um 15 % senkte. Weitere Fälle finden Sie bei JEO Motor Systems.
Unsere Motoren— intelligente Motoren, rahmenlose Drehmomentmotoren, Gelenkmotoren für humanoide Roboter, Hochleistungs-Roboteraktuatoren—setzen neue Maßstäbe, indem sie die Kompromisse zwischen Leichtbau, hohem Drehmoment und Haltbarkeit auflösen. Diese Innovationen erfüllen die Anforderungen an das Gelenkmotor-Design für bionische Gelenkmotoren, Schultergelenkmotoren und Gelenkmotor-Roboteranwendungen.
Da die Anforderungen an Effizienz, Portabilität und Zuverlässigkeit steigen, setzt JEO einen neuen Maßstab für die nächste Generation der Roboter-Gelenkaktuator-Technologie. Wir werden weiterhin das Gelenkmotordesign weiterentwickeln, um intelligentere Systeme in verschiedenen Branchen zu ermöglichen.